AGRICULTURE
There are mainly two types of data processing; GNSS only and GNSS + inertial processing. Both types of data processing can be performed by the either differential GNSS or PPP method.
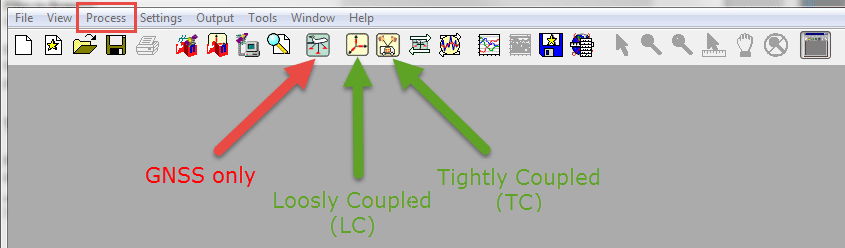
To process a project, a user may click any of the processing shortcut buttons, or navigate to the Process menu from the menu bar.
The processing options window will be different depending on the method of processing as GNSS only, LC, or TC; this is because LC and TC are methods of processing GNSS + inertial datasets and allow for the manipulation of inertial processing parameters.
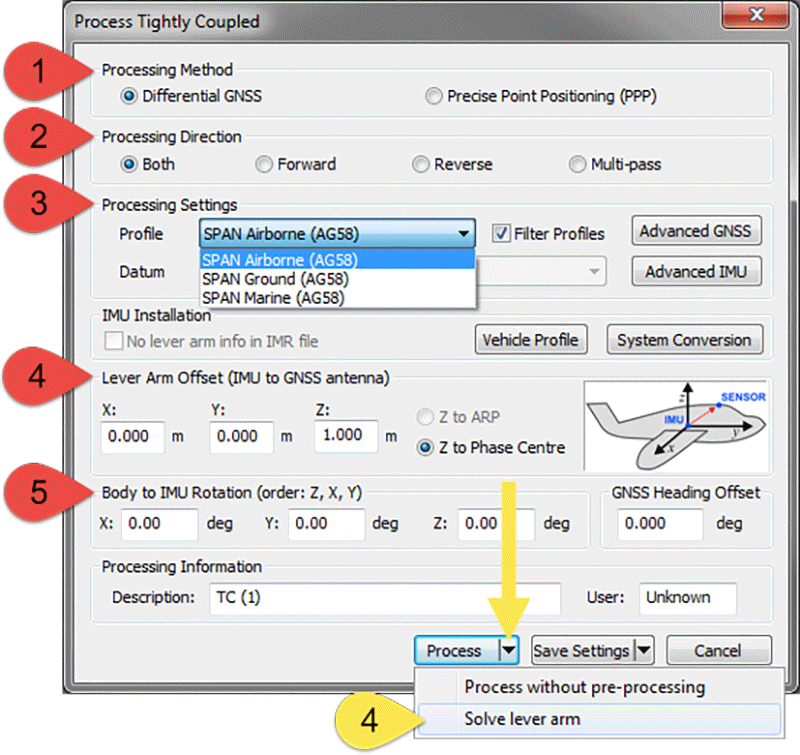
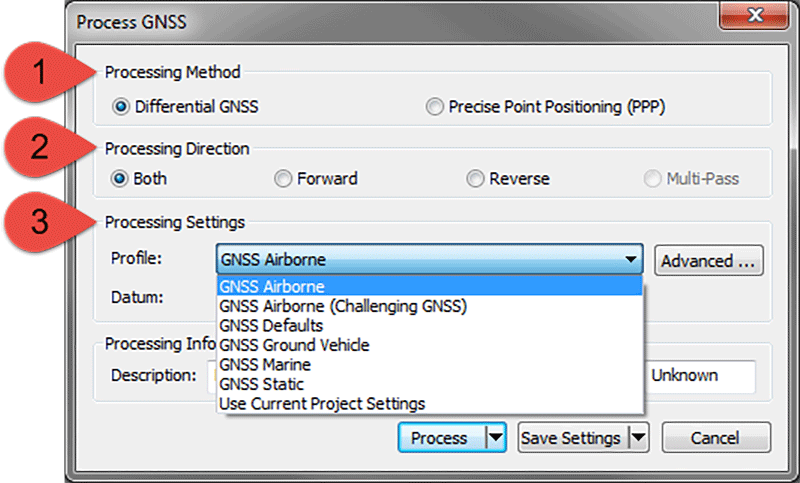
It is important in both GNSS and inertial processing that a user defines the:
1. Processing Method, where a user may select to process by the Differential GNSS or PPP method
Note: Differential GNSS is not an option if the project does not contain a master file
2. Processing Direction, where “Both” is the weighted-combined solution of the forward and reverse directions (most common), and where “Multi-pass” is the weighted-combined solution of the forward multi-pass solution (Forward - Reverse - Forward) and the reverse multi-pass solution (Reverse - Forward - Reverse).
Note: for GNSS only processing, “Multi-pass” is only the Forward - Reverse - Forward solution and is only available for the PPP method.
3. Processing Profile, which should be selected appropriately depending on the surveying environment (airborne, ground, or marine) and [if applicable] corresponding SPAN IMU.
When processing inertial datasets, it is also important to define the:
4. Lever Arm Offset parameters, which defines the vector from the IMU center to the measured reference point (ARP or Phase Center) of the GNSS antenna. If the lever arm parameters are unknown, they can be solved by processing multiple iterations starting from the best initial estimate defined by the user.
Note: “Gimbal Mount” parameters can be applied to translate the position determined at the IMU to a point of interest such as a camera or LiDAR instrument. This can be found under:
Advanced IMU | Updates | Gimbal Mount
5. Body to IMU Rotation parameters, which rotates the nominal frame used in processing (X-right, Y-forward, Z-up) to the IMU installation frame.
Note: the order of rotation is Z, X, then Y.