AGRICULTURE

On July 4th, 2012, twenty miles off the coast of Fort Lauderdale, Florida, Boeing's Unmanned Little Bird (ULB) program tested and demonstrated a highly precise navigation system for vertical takeoff and landing of an unmanned aerial system (VTOL UAV) in a maritime environment. It was the first time in history such a test had ever been successfully completed on a moving marine platform.
Utilizing NovAtel SPAN GNSS/INS receiver and antenna hardware and our ALIGN® relative positioning firmware, Boeing designed a precise navigation solution to guide its H-6U test helicopter VTOL UAV to a predetermined precision landing anywhere on a ship deck, regardless of deck dimensions.
The complexities of this test were significant. To be successful, the navigation system had to:

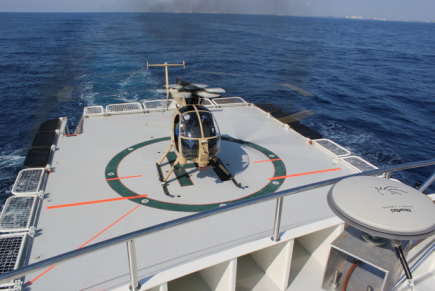
Secondary antenna mounted on the red pole (left) with Primary antenna mounted on the opposite pole (right)
Photo Credit: Boeing
Both the ship and helicopter were outfitted with NovAtel's SPAN-SE-D™ dual antenna GNSS/INS receivers. The ship system used two NovAtel 702GL antennas. The ship system used a Northrop Grumman LN200 IMU, while the helicopter system used a Honeywell HG1700 AG58 IMU.
The data links used between the SPAN-SE-D receivers were Microhard 2.4 GHz IP2421 frequency hopping spread spectrum RF modem radios. The data links transmitted differential correction data between the ship and the helicopter as well as transmitting the navigation solution back to “command center”.
This ULB maritime flight test initiative demonstrated the accuracy of the navigation solution, as well as the integration of the navigation solution with the automated flight control system on the Boeing H-6U Unmanned Little Bird. A total of 16 fully autonomous landings and 13 fully autonomous takeoff/departures were performed with the flight crew closely monitoring the controls and the aircraft position when in close proximity to the deck.
Photo Credit: Boeing
The benefits of using SPAN's relative positioning algorithm stems from taking advantage of NovAtel's ALIGN relative positioning solution. This provides a very precise relative solution between two moving platforms. Adding the tightly coupled GNSS/INS solution provided by SPAN provides continuous positioning solution through signal outages, and smooths out short term variations such as constellation changes, in addition to providing attitude.
One of the limiting factors of using the relative positioning system is having a good data link between the master and rover. There must be constant communication between the two systems in order to have continuous relative solution.