AGRICULTURE
Sometimes you do not need to know your precise position but you do need to know your position or an object's position, relative to another object or location. Our GPS and GNSS relative positioning solutions are used to:
Applications requiring relative GNSS positioning include:
Real Time GPS or GNSS Relative Positioning Solution:
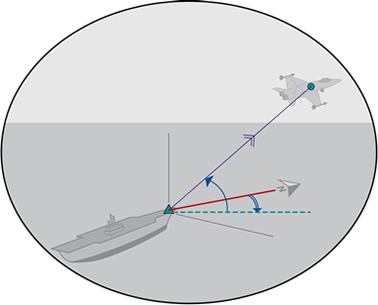
ALIGN® Relative Positioning
The figure below illustrates the Master receiver located on a marine vessel and the Rover receiver located on a fighter jet. Relative heading, pitch, baseline length and Rover position are computed with respect to the Master receiver.
Real-Time Kinematic (RTK) Relative Positioning
Post-processed Relative Positioning Solution:
Our Waypoint® moving baseline module GrafNav allows for GPS post-processing between two moving platforms. By processing directly between two moving kinematic objects, the accuracy of the relative trajectory can be improved significantly over that of a stationary base. This is especially true if the base station distance is much larger than the relative distance. If the two antennae are fix mounted, then heading can also be computed.
Post-processing takes advantage of both forward and backward data computations in order to generate the most accurate combined GNSS solution.
Two GNSS receivers' raw code and phase data can be post-processed in GrafNav to obtain relative positioning solutions. The forward post-processed solution is similar to the real time GPS or GNSS relative position determination system mentioned above.
When choosing a relative positioning solution, consider the following needs of your application:
OEM board level and board + enclosure GNSS receiver options.
Performance of a choke ring antenna without the size and weight. Features high phase center stability and low phase center offset.
Firmware that provides high precision attitude and accurate relative positioning information between two or more receivers in dynamic land, air and marine applications.