AGRICULTURE
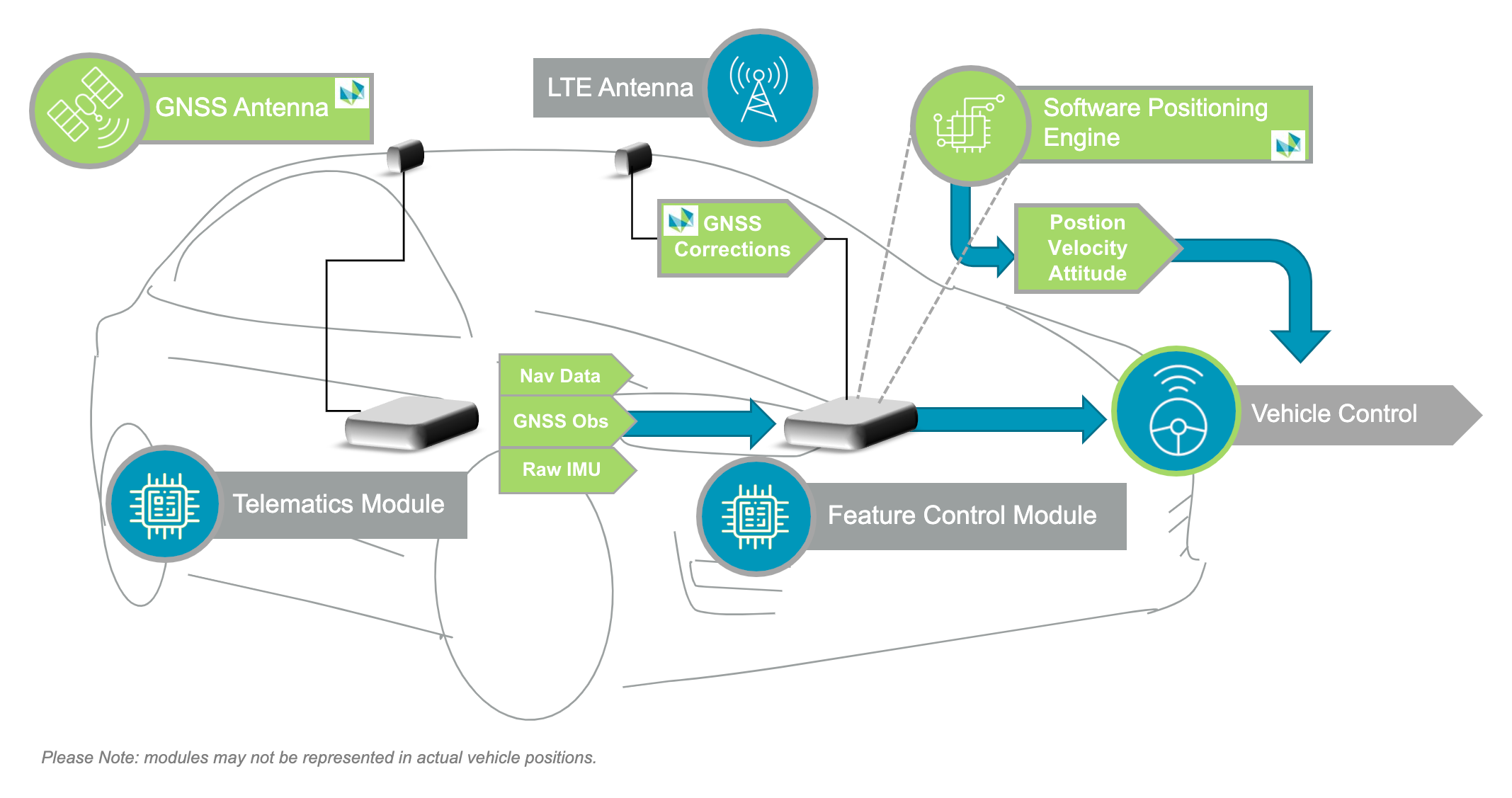
The software positioning engine accepts measurements from automotive grade GNSS chipsets and Inertial Measurement Units (IMUs) to produce an accurate position, velocity and attitude solution for Autonomous Driving (AD) and Advanced Driver Assistance Systems (ADAS). The architecture of the software positioning engine is customizable and designed to be able to accept data input from a variety of IMUs and wheel-speed sensors and is capable of being fused with other sensors such as cameras and LiDAR.
Features: