AGRICULTURE

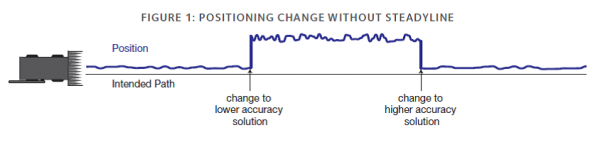
NovAtel’s STEADYLINE technology reduces position jumps that can occur when a GNSS receiver changes positioning modes. This effect is especially evident when a receiver transitions from a high accuracy RTK position solution to a lower accuracy solution such as PPP (TerraStar), DGPS, SBAS+GLIDE or even autonomous GLIDE™. Smooth transitions are extremely important for precision agricultural steering applications where sudden jumps are disruptive.
STEADYLINE internally monitors the position offsets between all the positioning modes in the receiver. When the current positioning mode becomes unavailable, the receiver automatically transitions to the next most accurate positioning mode. To handle the transition, STEADYLINE supports multiple accuracy modes including Maintain, Transition and Prefer Accuracy.
There are four STEADYLINE models: Maintain, Transition, Prefer Accuracy and UAL.
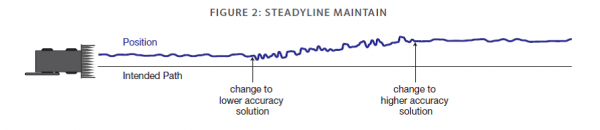
When the receiver transitions to a different positioning mode, it maintains the position offset calculated to limit a potential real position jump. The receiver continues to apply the position offset to all positions calculated in the new positioning mode (Figure 2).
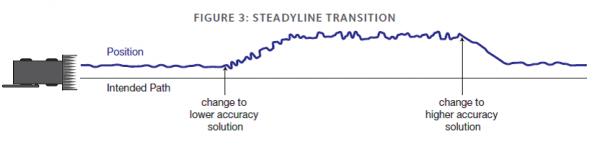
When the receiver transitions to a different positioning mode, the position offset is applied to the calculated position to limit a potential real position jump. The position then slowly transitions to the new reference position type over a user specified period of time (Figure 3).
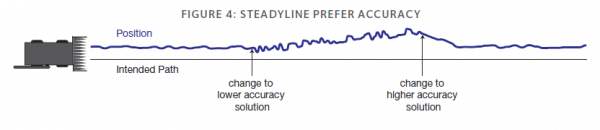
In Prefer Accuracy mode, the positioning mode change depends on the accuracy level of the positioning modes. When the position mode changes from a more accurate to a less accurate mode the receiver uses the Maintain option. When the position mode changes from a less accurate to a more accurate mode the receiver uses the Transition option.
User accuracy levels can be set to change the solution type in the GPGGA and BESTPOS messages. When User Accuracy Level mode is used along with STEADYLINE, the accuracy mode is adjusted based on the current estimated accuracy.
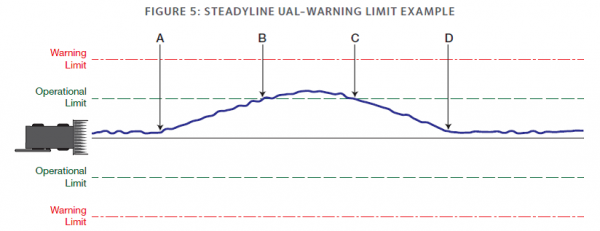
In Figure 5 below, the user has set operational and warning limits using the UALCONTROL command. At point A, higher accuracy corrections are lost and the receiver changes to a lower accuracy solution. When the position reported by the receiver is within the operational limits, the solution type reported in the BESTPOS message is OPERATIONAL and the receiver uses the Maintain accuracy mode. When the position reported is between the operational and warning limits (point B), the receiver uses the Prefer Accuracy mode and reports the position type as WARNING in the BESTPOS message. When the position reported by the receiver returns to below the Operational limit (point C), the solution type reported is OPERATIONAL, but the receiver continues to use the Prefer Accuracy mode until the position offset is removed. After the offset is removed (point D), the receiver transitions to the Maintain accuracy mode.
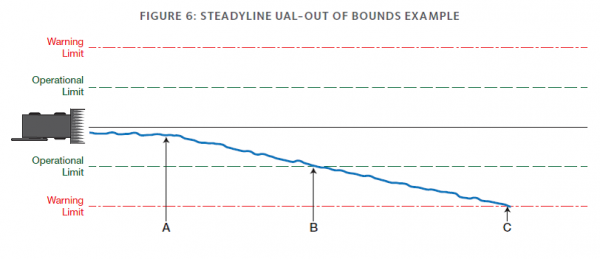
If the receiver position exceeds the Warning limit (point C in Figure 6 below), the solution type reported is OUT_OF_BOUNDS and the STEADYLINE feature is automatically disabled.