AGRICULTURE

NovAtel’s intelligent vehicle dynamics modeling and our patented Antenna Phase Windup technology come together in NovAtel’s SPAN Land Vehicle firmware to provide accurate position, velocity and attitude.
The below table depicts the average SPAN Land Vehicle performance at 1 hour of complete GNSS outage during typical driving conditions at an average speed of 65 km/hr. Position errors are represented in percent Error Over Distance Traveled (EDT).
| IMU Grade | Average EDT (%) Over 1 Hr | Average EDT (%) Over 1 Hr | Azimuth Error (deg) 1 σ Std. Dev. |
Azimuth Error (deg) 1 σ Std. Dev. |
| Land Profile | Land Profile with DMI | Land Profile | Land Profile with DMI | |
| Entry Level - S1 | 0.28% | 0.15% | 1.76 | 1.59 |
| Mid-Range - S2 | 0.10% | 0.05% | 0.18 | 0.17 |
| High Performance - S3 | 0.08% | 0.05% | 0.12 | 0.10 |
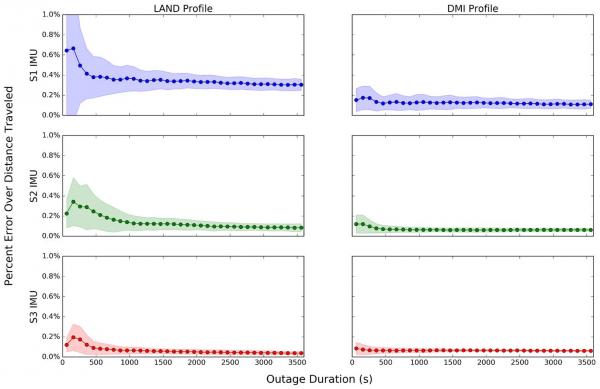
The below image depicts the error over distance traveled over 1 hour of complete GNSS outage.
Error over distance traveled varies with test-route trajectory and dynamics. See the following paper for more details: "NovAtel's SPAN Land Vehicle Performance Analysis - May 2017".
Card level GNSS receivers in multiple hardware and software configurations.
IMUs from leading manufacturers. Range of performance levels available.