
AGRICULTURE
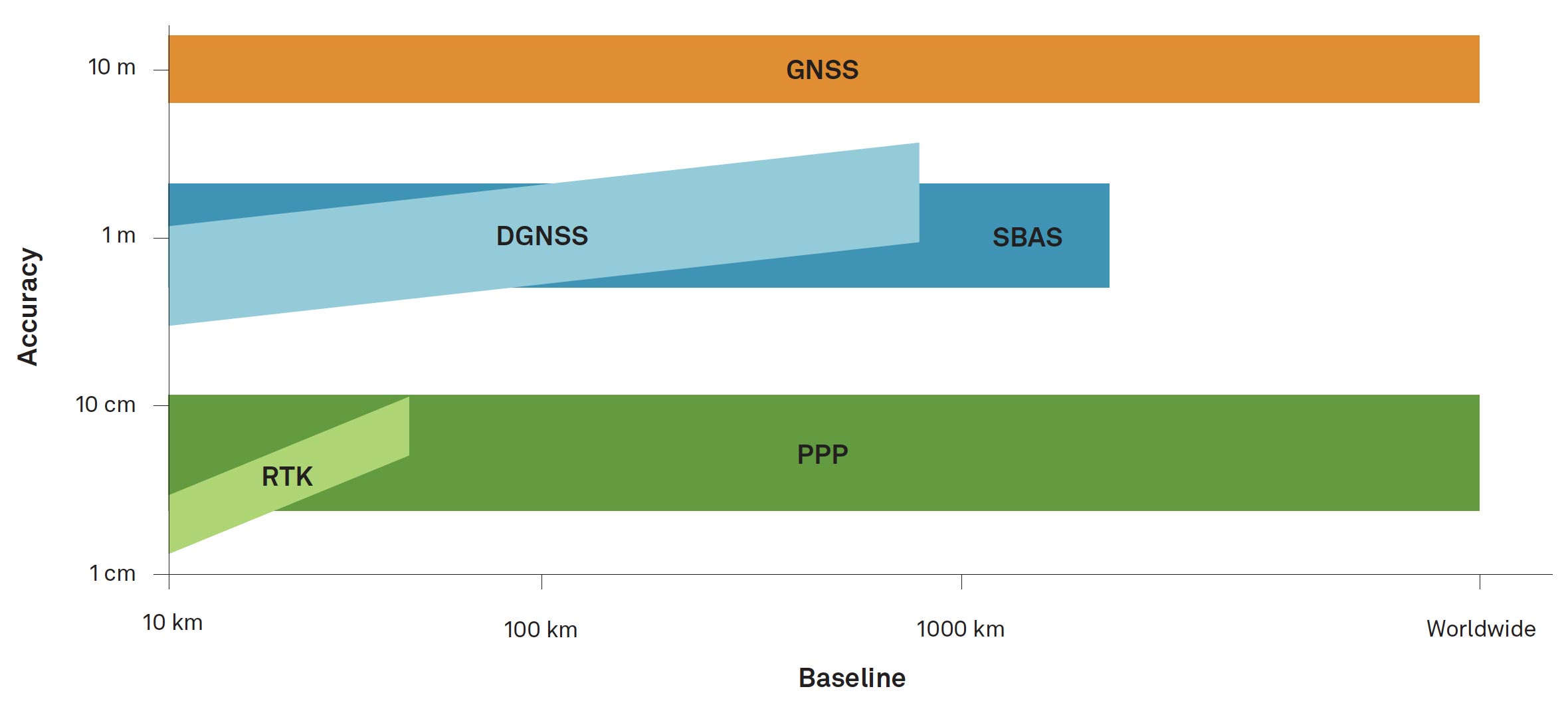
As discussed at the start of this chapter, there is no best GNSS correction method, only a method that best suits the intended application. Figure 46 compares the accuracy and practical range of use for each of the methods discussed in this chapter. The following sections provide comparisons between the correction methods.
The configuration of DGNSS and RTK systems are similar in that both methods require a base station receiver set up at a known location, a rover receiver that gets corrections from the base station and a communication link between the two receivers. The difference is that RTK (a carrier phase method) is significantly more accurate than DGNSS (a code-based method).
The advantage of DGNSS is that it is useful over a longer baseline (distance between a base station and rover receivers), and a DGNSS is less expensive. The technology required to achieve the higher accuracy of RTK performance makes the cost of an RTK-capable receiver higher than one that is DGNSS-capable only.
An SBAS and a PPP system are similar in that both receive corrections from satellites. However, a PPP system is significantly more accurate than an SBAS. Part of the accuracy advantage is the positioning method. PPP uses the carrier phase method, and SBAS uses the code method. The other part of the accuracy advantage is that the private correction services typically used by PPP systems provide higher quality corrections.
The advantage of SBAS is that the correction services are free for everyone to use. While the private correction services provide higher quality corrections and are available worldwide, a paid subscription is required to access the signals.
While the accuracy of DGNSS and SBAS are similar, the equipment required for the system differs.
An SBAS solution only requires an SBAS capable receiver and a GNSS antenna. A DGNSS requires a base station receiver and antenna, a rover receiver and antenna and a communication link between the base station and rover. As well, the DGNSS requires additional system setup as the base station must be in a known location.
Like DGNSS and SBAS, RTK and PPP offer similar accuracies, but the equipment and setup required is different.
An RTK system typically offers higher accuracy and quick initialisation, but is more complex to setup and more expensive. The RTK system requires at least two RTK capable receivers (one base station and one or more rovers), a GNSS antenna for each receiver and a communication link between the receivers. Also, to achieve the high level of accuracy, the base station must be very precisely set up at a known location.
A PPP solution has a simpler configuration: a single PPP compatible receiver, an antenna capable of receiving GNSS and L-Band frequencies and/or Internet and a subscription to a corrections service provider. However, PPP has a somewhat lower accuracy and longer initial convergence time, though some advanced PPP systems have reduced these limitations significantly.
Another differentiator is the baseline length. The distance between base station and rover (baseline length) on an RTK system directly impacts system accuracy. At short baseline lengths, a few kilometres or miles, RTK is very accurate. However, as the baseline length increases, the accuracy and availability of a solution decreases. At long baseline lengths, RTK can no longer be used. Because PPP does not use a base station, it is not affected by baseline length and can provide full accuracy anywhere in the world.










