AGRICULTURE

The Proliferation of unmanned aerial vehicles—UAVs, more popularly known as “drones”—have dominated the attention given to unmanned systems in recent months. On the ground, however, engineers around the world are putting a lot of miles into their efforts to bring driverless vehicles out of the lab and onto the road.
Several years ago, the Defense Advanced Research Projects Agency (DARPA) Grand Challenge captured headlines with its competitions across California deserts, which later migrated to a city environment, it became known as the “Urban Challenge.” In 2005, the Grand Challenge winner—an autonomous vehicle named Stanley, built by a Stanford University team—incorporated NovAtel’s ProPak product, a dual-frequency Global Navigation Satellite System (GNSS)+Inertial Navigation System (INS) that used a Satellite Based Augmentation System (SBAS) to improve absolute positioning.
More recently, China rolled out its Intelligent Vehicle Future Challenge (IVFC), a series of annual competitions underwritten by the National Natural Science Foundation of China (NSFC) through its major research plan, “Cognitive Computing of Visual and Auditory Information.” Among the goals of the plan was the development of “verification platforms of unmanned vehicles with the perception of natural environment and the ability of decision-making.”
Beginning in 2009, the IVFC staged races in various regions of China, beginning—much as the DARPA events did—with more remote rural courses in northern China before moving into increasingly urbanized environments.
The first two years, the event took place near Xi’an in Shaanxi province in the northwest of China, then moved even further north in Ordos and Chifeng, both in China’s Inner Mongolia Autonomous Region. In 2013 and 2014, the IVFC moved to Changshu in Jiangsu Province, near the east coast of China. The first two races took place inside closed facilities; the next two, on rural roads, and finally in more urban environments.
Among the research and development groups taking part is the Institute of Artificial Intelligence and Robotics at Xi’an Jiaotong University. Jingmin Xin, a professor at the university, served as the director of IVFC 2013. Dr. Xin and his colleague, Dr. Shaoyi Du, an associate professor who also works in the institute, described some of the details and operations of the competition, in which the university competes with Kuafu-1, a Toyota Highlander-based prototype driverless vehicle that employs NovAtel’s SPAN® GNSS+INS technology for positioning.
“Our goal is to create a test platform with which to study intelligent machine vision and hearing,” they explained. Eighty percent of information that humans get from the world is visual, they pointed out; only 10 percent is auditory and the other 10 percent, tactile.
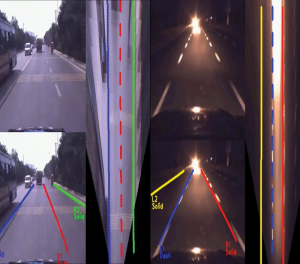
The vehicle also contains various sensors, for example, a camera used for visual data—to sense the natural environment and detect objects on the road. This data supports “intelligent decision making” by the vehicles to implement such functions as braking, acceleration, and so forth.
As for positioning and navigation, the version of SPAN that Xi’an Jiaotong University uses incorporates a NovAtel ProPak-V3 GNSS receiver and a UIMU-LCI tactical grade Inertial Measurement Unit (IMU) from Northrop-Grumman Litef GmbH. The GNSS position update rate is 20 Hz while the IMU data rate is 100 Hz. For the 2015 race, the university will purchase a NovAtel ProPak-6, according to Lu Yu, NovAtel’s chief representative for China who has been working with professors Xin and Du.
“Roads are much more difficult environments than that faced by UAVs,” said Dr. Xin. “Racing is the best way to show what we have learned from our research.”
Two components comprised the 2013 iteration of IVFC: a suburban road test about 18 kilometres and along about 5 kilometres of urban road testing. The latter contained many bridges, trees, tunnels, a highway entrance ramp and other settings. Among the situations encountered along the suburban route were moving vehicles, traffic lights, a construction detour, and obstacle avoidance. The urban tests included making a U-turn, crossing intersections, slowing down in front of a school and stopping for pedestrians in crosswalks.
Chinese automakers are cooperating with IVFC participants to adopt Advanced Driver Assistance System (ADAS) technologies. For example, Xi’an Jiaotong University has worked with Japan’s Toyota Company and the Chinese automaker Chery.
Participation in IVFC has increased over the years. In 2009, only seven teams took part. By 2014, the number had grown to 22, and Xi’an Jiaotong’s Kuafu-1 finished fifth among the vehicles entered.
The goal of the IVFC program is to eventually demonstrate the ability of driverless cars to travel 2,000 kilometres (1,240 miles) at speeds up to 120 kph (about 75 mph) on highways and 40 kph (24 mph) in the city.
According to Professor Du, several main obstacles must be overcome to introduce commercially viable unmanned vehicles into China. “Reliability is the biggest challenge for commercialization,” he said. And, finally, component prices for current models of intelligent vehicles remain high.