AGRICULTURE
The phrases “GPS denied” and “GNSS denied” seem to have gone viral. They have even made their way into official requirements documents. But without qualification and explanation, it is little better than the enigmatic requirement for Position, Navigation and Timing (PNT) of a significant military program that once stated that “There shall be GPS”. This article presents answers to the question “Why would GPS be denied?” as well as examines strategies to mitigate against denial of GPS to ensure users can maintain an actionable PNT.
The primary causes of GPS denial include interference, spoofing, signal blockage and GPS constellation failure.
The GPS and other GNSS signals transmitted via satellite are extremely low power, hidden below the thermal noise floor by the time they reach the surface of the Earth. This low power characteristic makes the GNSS signals susceptible to disruption by even very low power interference. For example, a simple 1 Watt interferer in the GNSS bands can totally deny reception of the signal for many kilometres.
GPS denial via interference can be separated into the two broad categories: unintentional interference and intentional interference (jamming). There have been many documented cases of unintentional interference over the years, ranging from faulty TV receivers to other non-GNSS transmitting sources leaking into the GNSS frequency bands. Jamming however is a more immediate and dangerous concern. People may try to jam GNSS signals in a local area for a number of reasons, including privacy concerns over tracking of their location by others. Although illegal in most jurisdictions, very low power jammers known as “personal privacy devices” can be bought on the Internet and used for this purpose. Recent high profile examples include a personal privacy device in a truck causing intermittent disruptions of GPS for landing of aircraft at Newark Airport, ultimately resulting in a fine of $31,875 for the truck driver. Adversaries may choose to jam GNSS for tactical purposes, and may deploy many small low power jammers or even larger power jammers to disrupt GNSS over wide areas, as in the jamming alleged to come from North Korea .
There are a number of protection techniques, with the level of protection increasing as the number of techniques used increases.
Anti-jam antennas protect against GNSS interference by dynamically adjusting the effective antenna gain pattern and steering 'nulls' in the gain pattern towards the direction of the interferer. This prevents the majority of the interfering power from entering the GNSS receiver. NovAtel's GPS anti-jam technology uses multiple antenna elements and digital null forming antenna electronics, allowing a connected receiver to continue to provide a PNT solution in the presence of interference.
Multi-frequency receivers also provide a means of protecting against interference. For example, if interference in the L1 frequency band around 1575 MHz is completely jamming GPS and GLONASS, it is usually possible to continue to calculate a PNT solution using the L2 GPS and GLONASS frequency band around 1227 MHz.
If the duration of the interference is short, an integrated solution, like NovAtel's SPAN® technology, which deeply couples a GNSS receiver with an Inertial Measurement Unit (IMU), can be used to bridge the GNSS outages. In general, the better the quality of the IMU, the better the PNT solution during these outages. Additional sensor inputs such as odometer or altimeter inputs can be used to further aid the PNT solution, and there is a growing trend to use low-frequency RF systems like eLoran in conjunction with GNSS and other sensors.
With any GPS denied scenario, it is ideal to have situational awareness to know if jamming (intentional or otherwise) is occurring so that actions can be taken to reduce or eliminate the jamming. NovAtel® has been conducting research in this area by taking samples of the GNSS Radio Frequency (RF) spectrum and time-tagging the samples with precise GNSS time stamps. This is done with standard NovAtel OEM628™ receiver hardware. Neil Gerein, NovAtel's Defense Product Manager stated, “By analyzing short “snapshot” samples, we can not only detect jammers, but also “fingerprint” the jammer by examining the signal characteristics. Taking this one step further we have demonstrated that if multiple receivers can 'see' the jammer simultaneously we can determine the location of the interference source.”
In March 2014 the Canadian Army conducted trials of NovAtel's GPS Anti-Jam Technology(GAJT®) in an operational environment. The successful trials, which were done under the auspices of the Build in Canada Innovation Program (BCIP), showed that GAJT protected the Position, Navigation & Timing (PNT) systems of the vehicle even while there was GPS jamming in action. The Light Armoured VehicleIII Observation Post Variant (LAV III OPV) was chosen for its particular PNT needs, especially for artillery target acquisition equipment which was shown to operate with GAJT to the same level of precision and functionality as with the standard GPS antenna.
Spoofing makes a victim receiver 'think' that it is at a different location than it really is. This occurs when an adversary generates a false signal that supplants the real signal. The most robust way to protect against spoofing is for an authorized user to operate a receiver like NovAtel's OEM625S SAASM GPS receiver, to track the military encrypted Y-code signal on GPS L1 and L2. Users without access to Y-code can still protect against spoofing by using a multi-constellation, multi-frequency receiver. Fortunately, techniques that protect against normal interference and jamming can also protect against this kind of attack.
Spoofing of GNSS is complicated and requires sophisticated equipment to generate the spoofing signal and good knowledge of the victim receiver's velocity. The complexity of this spoofing equipment increases greatly if the adversary tries to spoof all known GNSS constellations simultaneously. A multi-GNSS, multi-frequency receiver is used as a cross check against possible spoofing sources. Also, the false signal has to supplant the real signal, so normal anti-jam systems like NovAtel's GAJT have a role in preventing the loss-oflock on to the real signal.
Likewise, multi-sensor navigation like NovAtel's SPAN GNSS+INS technology is an excellent method to protect against spoofing, particularly if the additional sensors for the PNT solution do not depend on GNSS. IMUs used in NovAtel's SPAN systems rely on accelerometers (motion sensors) and gyroscopes (rotation sensors). These sensors cannot be spoofed. Other lower fidelity RF positioning and timing solutions like eLoran are very difficult to spoof or jam because they use highpower fixed transmitting stations.
In the same vein, optical techniques and “Signals of Opportunity” (RF signals that were never meant to be used for navigation) when coupled with other PNT sensors are shown to be effective although the quality of the solution is highly dependent on sensor quality. Research to date has shown that signals like AM radio can be effective for navigation and timing applications; and optical techniques can help with relative navigation and absolute PNT when compared to a geo-referenced image database.
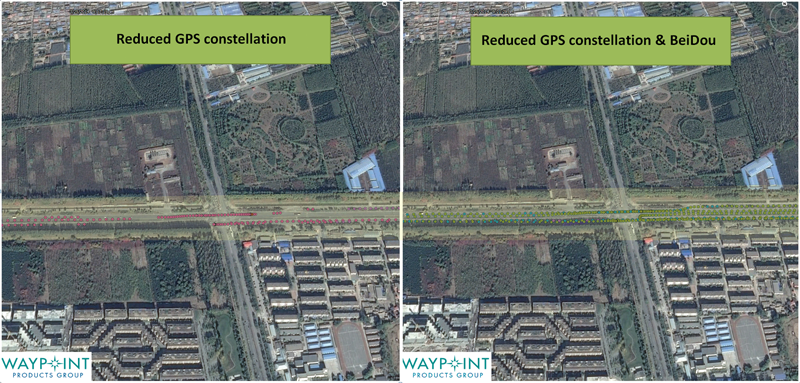
GNSS can be denied in difficult environments due to a lack of a clear line of sight path between the satellites and the user antenna. Examples include blockages due to the large safety fences at car races, tall buildings causing “urban canyons”, signal tracking under bridges and through tunnels, and operation under foliage. Signal blockage decreases signal availability, so the best line of defense is to maximize the number of satellites tracked. With GPS and GLONASS constellations at full operational capability, Galileo starting to come on line, and systems like BeiDou, QZSS and IRNSS providing regional coverage, multi-constellation GNSS receivers can now provide continuous PNT solutions in environments where GNSS was previously denied.
NovAtel's SPAN technology integrates GNSS and IMUs to offer seamless navigation during GNSS denials due to signal blockage. The inertial navigation solution continues to provide measurements and a continuously available solution in the total absence of GNSS. The INS solution will drift over time due to errors in the IMU data. This drift error can be corrected when the GNSS signals become available again, even if fleeting, as the IMU-based solution aids the GNSS receiver to reacquire the satellite signals. The tightly-coupled SPAN system can even correct for IMU errors when only one satellite is in view.
The doomsday scenario of a GNSS constellation becoming unusable is very unlikely. This isn't to say that the risk of a common mode failure affecting an entire GNSS constellation or even multiple constellations cannot be ruled out, and the possibility of extreme solar events also have to be taken into account. But the potential for catastrophic failure is mitigated by the constellation owners, e.g. the U.S. Space-Based PNT Policy of December 2004 states that the U.S. Government shall provide: uninterrupted access to U.S. space-based PNT services for U.S. and allied national security systems and capabilities through GPS; continuous civil space-based PNT services free of charge; and improved capabilities to deny hostile use of any space-based PNT services without unduly disrupting civil access to PNT outside of an area of military operation or for homeland security purposes. In common with other GNSS, there is redundancy in the number of satellites. Loss of service from a few of them would not have a great effect on total-system resilience.
Disruptions to the ground control segment cannot be ruled out, of course, and the ground stations could be attacked or subject to natural disaster. Again, the mitigation in place for such events includes multiple redundancies. So, while GNSS system failure is unlikely, it is prudent to address the risk by ensuring that reversionary modes are in place and that operators are trained in their use. And, as with the other potential risks to GNSS-based PNT discussed in this article, a multi-layer, multi-sensor approach is recommended.
Discussions about operating in GPS or GNSS denied conditions are important and useful They point out the ubiquitous reliance on GPS and other GNSS that has resulted in the casual assumption that accurate PNT is a constant “given”. Users are now becoming much more aware of the use of GNSS embedded in systems, such as those enabling secure communications through precise GPS timing which are not immediately obvious-but are just as vulnerable to GNSS failure.
This growing awareness of vulnerability is leading to better analysis and definition of PNT requirements. There is also growing understanding that while GNSS brings huge benefits, it also has vulnerabilities that must be managed appropriately. Mr. Gerein concludes, “We need to adopt an eyes-open approach, recognising and mitigating risks and using the best of the wide range of available sensors with their complementary benefits and ability to compensate for others' shortcomings.”
Download the latest edition of Velocity magazine.