AGRICULTURE
We can expect unaided GNSS accuracy to be about 2 to 5 metres (2.2 to 5.5 yards) 95% of the time. The demands for self-driving vehicles are much more stringent than this. AVs are typically looking for accuracy in the order of 2 decimetres (7.8 inches) and need guarantees that the error is smaller than the width of a standard lane.
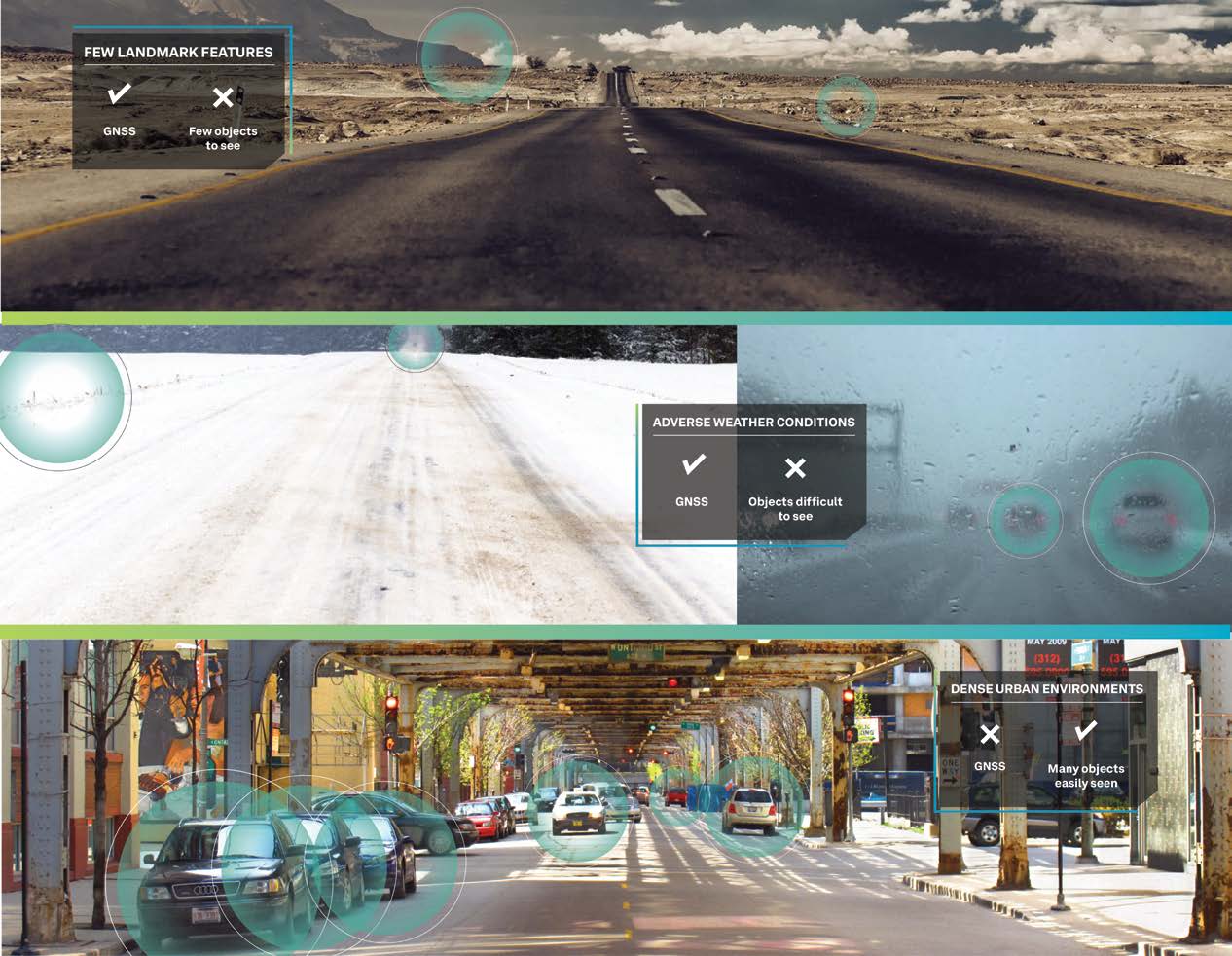
Achieving this increased level of accuracy requires a source of external corrections to allow carrier phase positioning. The industry has more or less settled on PPP due to its advantages over RTK in large-scale deployments. GNSS complements vision and localisation sensors by providing a source of absolute positioning, independent from relative positioning sensors. GNSS is useful in open-sky environments (Figure 53, top panel) where there are few landmarks or objects for sensors to reference for relative positioning, and during adverse weather conditions (Figure 53, middle panel), which don’t pose a problem for GNSS, as it is almost entirely immune to weather effects.
PPP limitations become apparent when driving under an overpass, for example (Figure 53, lower panel). PPP requires a continuous view of every satellite in use, and as soon as that’s broken, PPP is no longer available and will need time to reconverge. Such environments require additional sensor input to aid the GNSS, with IMUs being the most obvious addition. An IMU calculating relative motion by measuring 3D acceleration and rotation can generate data to help provide positioning, velocity and attitude throughout a PPP outage and reconvergence period.