AGRICULTURE

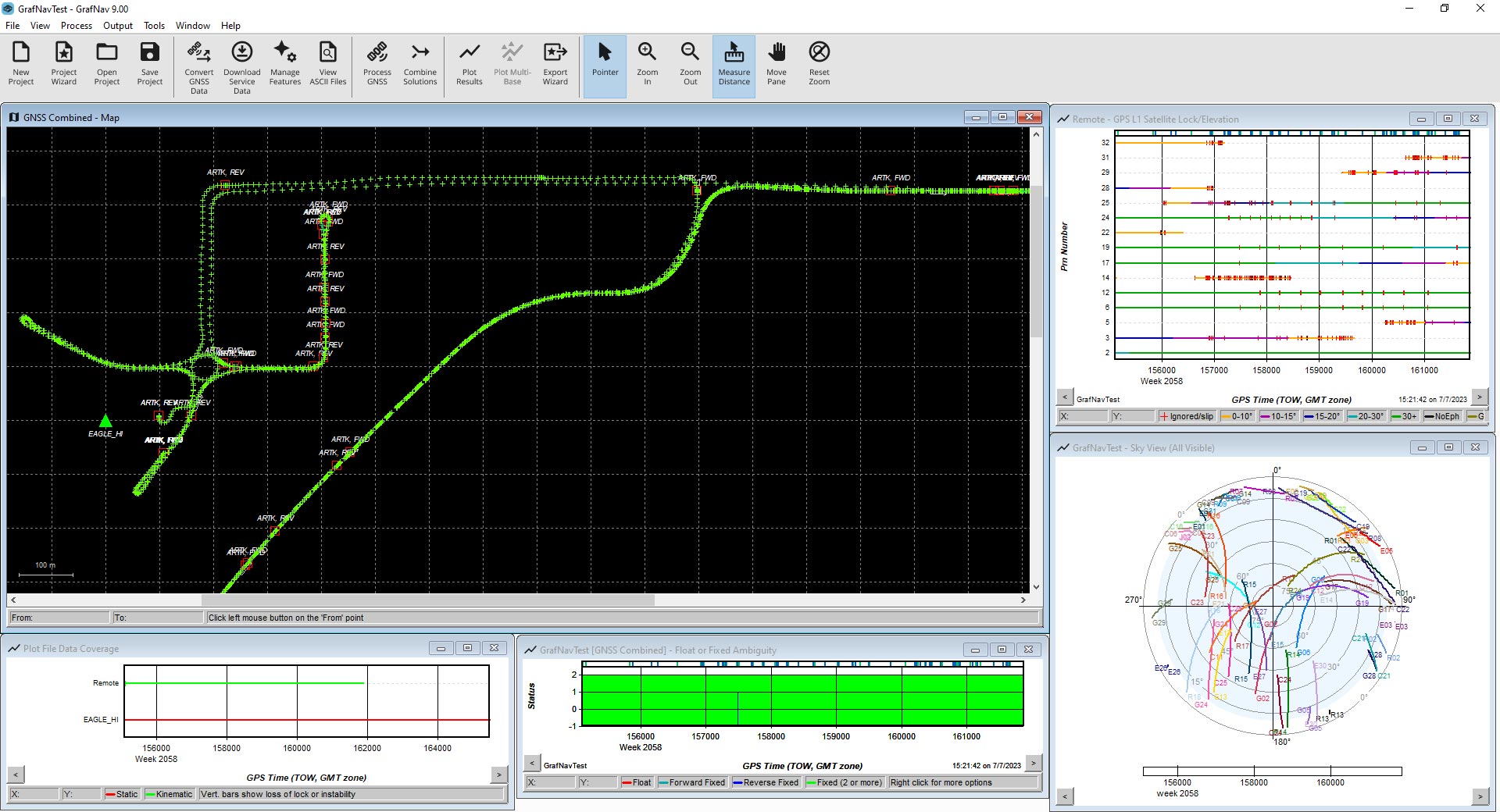
Waypoint GrafNav post-processing software is a powerful, highly configurable processing engine providing the best possible static or kinematic GNSS accuracy using all available GNSS data. Supporting data formats from third-party single and multi-frequency commercial receivers, GrafNav includes a full suite of data and solution visualisation and diagnostic tools for quality assurance.
No matter your project, GrafNav is configurable to optimise your results. Up to 32 base stations can be added to each project, including publicly available satellite clock and orbit data from thousands of global reference stations across public networks and/or HxGN SmartNet. Users can achieve centimetres-level position accuracy post-mission using precise point positioning (PPP) corrections with kinematic trajectories. With built-in ionospheric processing for dual-frequency users, a float static solution for long and/or noisy baselines and multi-base processing covering large areas, GrafNav is flexible to achieve the best possible results for your unique GNSS application.
GNSS technology computes position and velocity for various real-time applications, including vehicle navigation and tracking. However, additional technologies like correction services and post-processing are needed to maximise both GNSS availability and accuracy. GrafNav refines your raw GNSS data by resampling, concatenating and splicing, processing forward and reverse in time then combining and smoothing the final trajectory. Moving baseline processing is supported, as well as heading determination using two fixed antennas on the same moving vehicle.
TerraStar-NRT is a multi-constellation correction service that enables centimetre-level accuracy in post-processing without the need for a base station. High rate satellite clock and orbit products are uploaded to a NovAtel server every 15 minutes to allow for post-processing almost immediately after data collection. When used with the PPP-AR Engine with NovAtel receivers, it provides better horizontal accuracies for short duration surveys. A TerraStar-NRT license is available as a yearly subscription and must be activated in Waypoint Software through the local license manager to use.
A post-processing package streamlined for static GNSS-only data and includes a batch static baseline processor and network adjustment package.
The Waypoint software development kit delivers complete control over the GrafNav and Inertial Explorer post-processing functions so you can customise and automate your workflows.
A post-processing package streamlined for static GNSS-only data and includes a batch static baseline processor and network adjustment package.
The flagship Waypoint software product, Inertial Explorer maximises the accuracy of your GNSS+INS trajectory post-mission with tightly coupled integration for generating...